openrr_apps_joint_position_sender
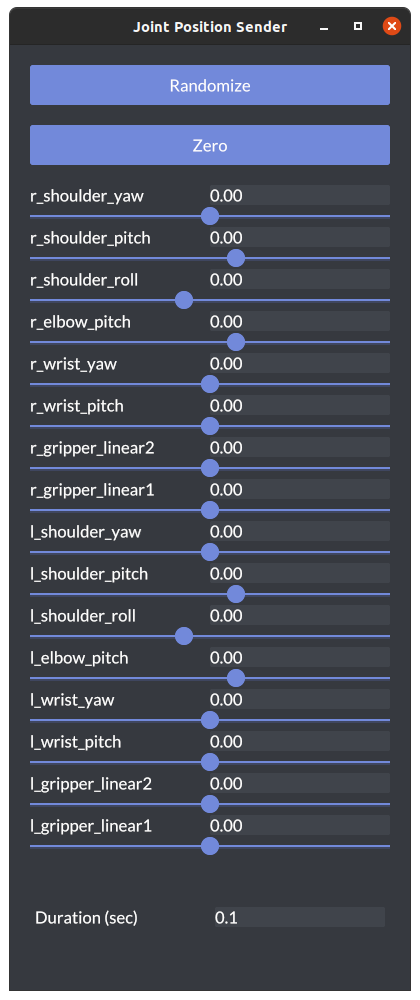
The openrr_apps_joint_position_sender allows you to specify the value of each joint for manipulators and other articulated robots.
openrr_apps_joint_position_sender
Usage
openrr_apps_joint_position_sender [OPTIONS]
| Options | Description |
|---|---|
| -c, --config-path <CONFIG_PATH> | Path to the setting file |
| --config <CONFIG> | Set options from command line. These settings take priority over the setting file specified by --config-path |
| -h, --help | Print help information |