Operating robot from CLI
Move the robot arm
From the command text file
If you have not cloned OpenRR, do this.
git clone https://github.com:openrr/openrr
cd openrr
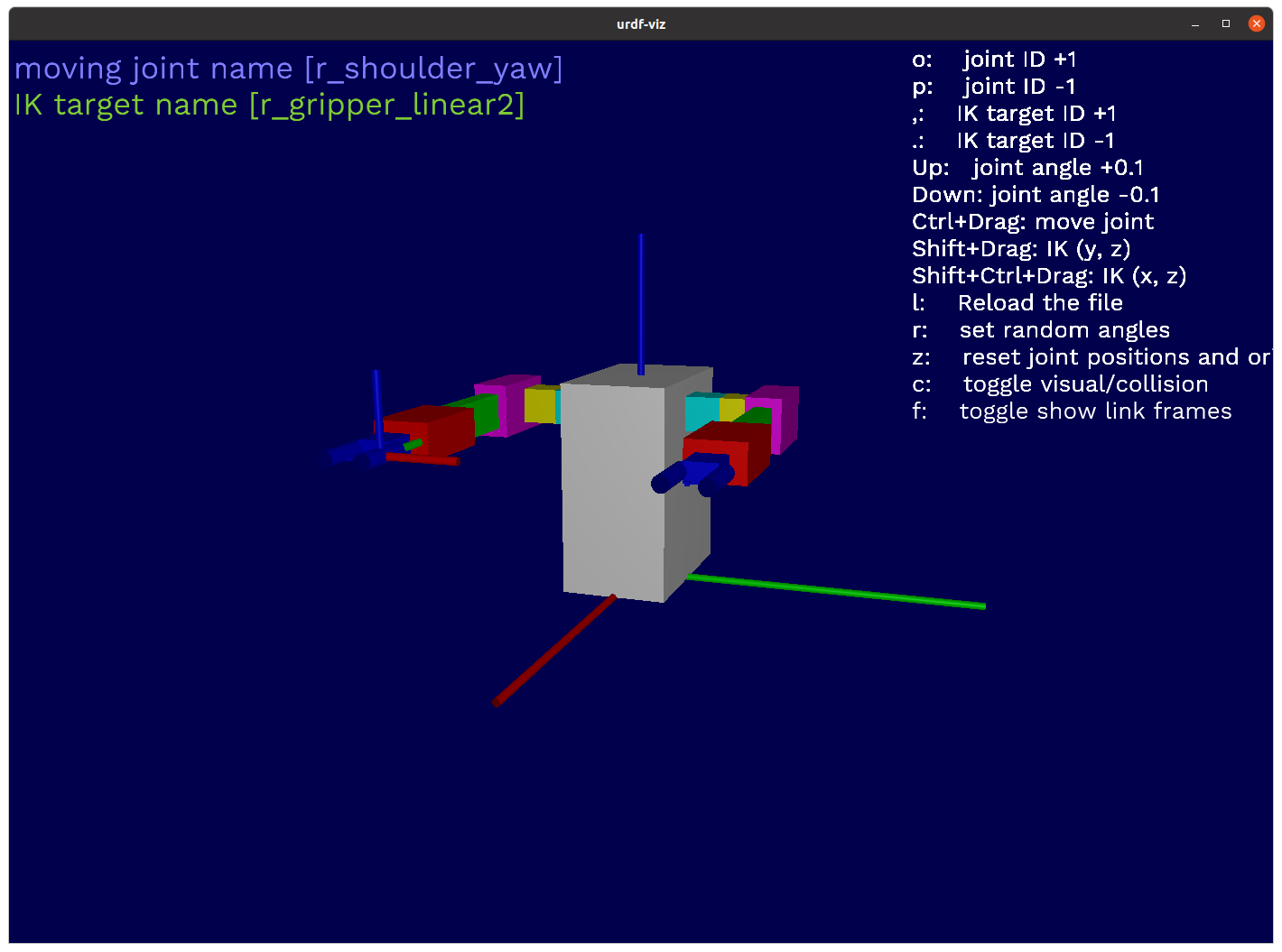
Let's display the sample robot arm.
urdf-viz ./openrr-planner/sample.urdf &
You can use load_commands to execute commands in a text file. Now, let's do it for the robot arm.
openrr_apps_robot_command \
--config-path ./openrr-apps/config/sample_robot_client_config_for_urdf_viz.toml \
load_commands ./openrr-apps/command/sample_cmd_urdf_viz.txt
Finally, if the terminal outputs the following, it is successful.
PrintSpeaker: "This is sample robot"
From your command line
It can also be executed by typing the command directly without using load_commands. Try to get the robot arm status.
openrr_apps_robot_command \
--config-path ./openrr-apps/config/sample_robot_client_config_for_urdf_viz.toml \
get_state l_arm
The output will be as follows.
Joint names : ["l_shoulder_yaw", "l_shoulder_pitch", "l_shoulder_roll", "l_elbow_pitch", "l_wrist_yaw", "l_wrist_pitch"]
Joint positions : [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
Let's send the command value of the joint angle.
openrr_apps_robot_command \
--config-path ./openrr-apps/config/sample_robot_client_config_for_urdf_viz.toml \
send_joints l_arm -j 0=1.2 -j 1=-1.2 -j 2=0.0 -j 3=1.2 -j 4=0.0 -j 5=0.0
The robot arm moved.
Robot client config file
This is sample config file for single robot arm. Whether on a simulation or a real robot, operations from OpenRR can be realized by specifying the config file corresponding to the robot as shown below.
However, the urdf-viz item, like [urdf_viz_clients_configs], must be changed to ROS or similar.
[[urdf_viz_clients_configs]]
name = "arm"
joint_names = [
"shoulder_yaw",
"shoulder_pitch",
"shoulder_roll",
"elbow_pitch",
"wrist_yaw",
"wrist_pitch",
]
wrap_with_joint_position_limiter = true
# If joint_position_limits is not specified, limits will be got from URDF.
# The following values are the same as if getting limits from URDF.
joint_position_limits = [
{ lower = -3.0, upper = 3.0 },
{ lower = -2.0, upper = 1.5 },
{ lower = -1.5, upper = 2.0 },
{ lower = -2.0, upper = 1.5 },
{ lower = -3.0, upper = 3.0 },
{ lower = -2.0, upper = 2.0 },
]
[openrr_clients_config]
urdf_path = "{path_to_urdf}/sample.urdf"
self_collision_check_pairs = ["shoulder_yaw:gripper_linear1"]
# Client config for left arm
[[openrr_clients_config.collision_check_clients_configs]]
name = "arm_collision_checked"
client_name = "arm"
[[openrr_clients_config.ik_clients_configs]]
name = "arm_ik"
client_name = "arm_collision_checked"
solver_name = "arm_ik_solver"
[[openrr_clients_config.joints_poses]]
pose_name = "zero"
client_name = "arm_collision_checked"
positions = [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
[openrr_clients_config.ik_solvers_configs.l_arm_ik_solver]
ik_target = "tool_fixed"