Operating robot from GUI
Move the robot arm
If you have not cloned OpenRR, do this.
git clone https://github.com:openrr/openrr
cd openrr
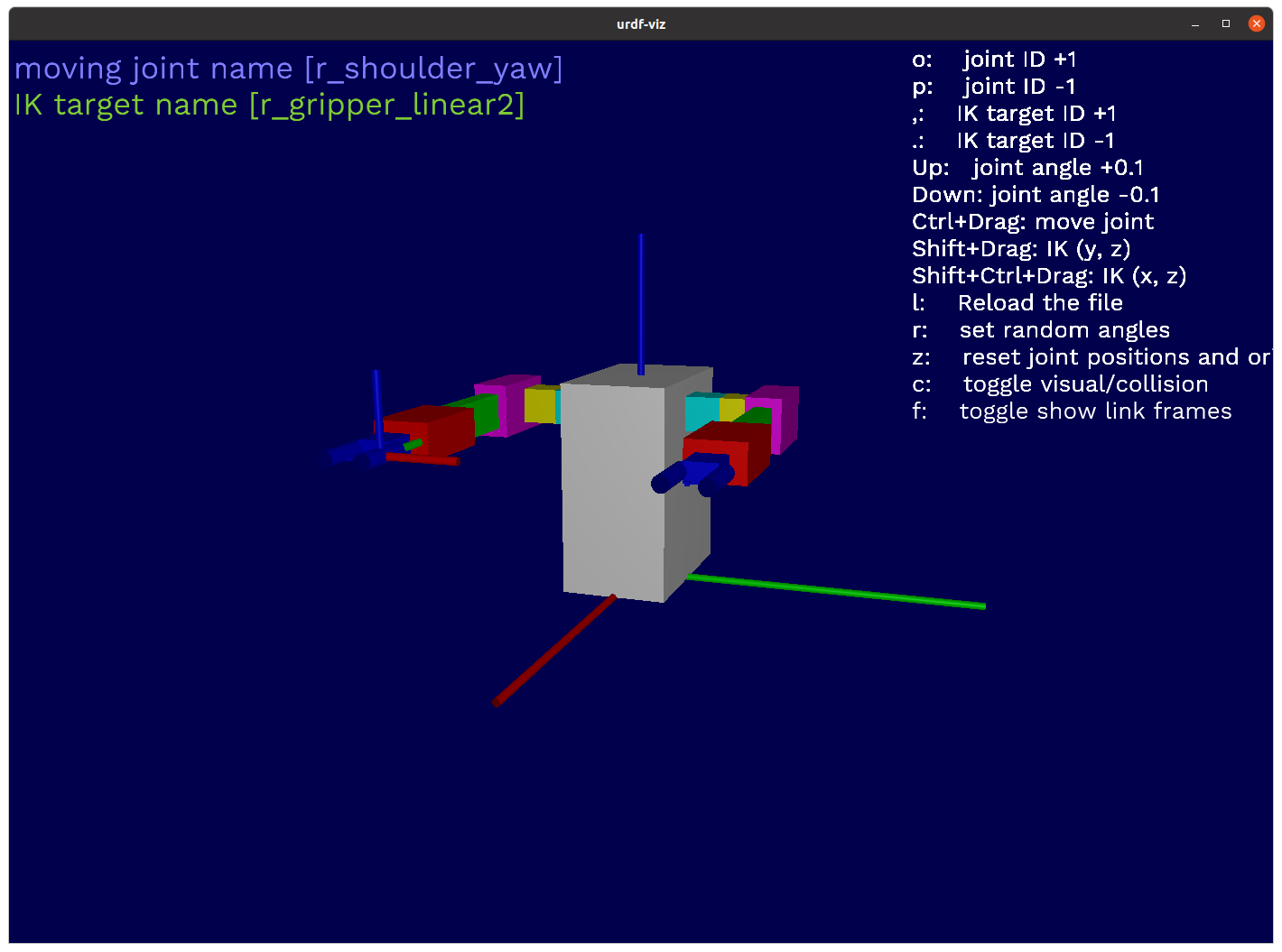
Let's display the sample robot arm.
urdf-viz ./openrr-planner/sample.urdf &
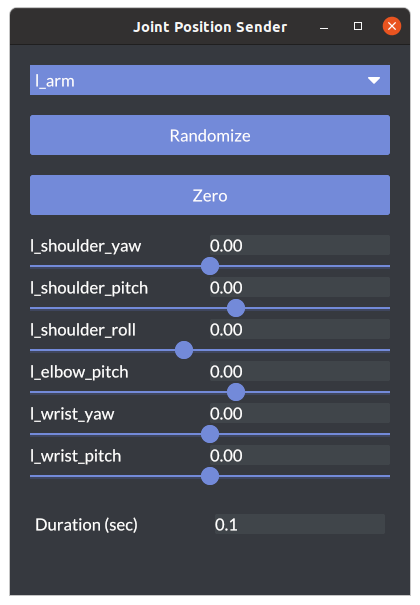
openrr_apps_joint_position_sender
openrr_apps_joint_position_sender \
--config-path ./openrr-apps/config/sample_robot_client_config_for_urdf_viz.toml
By sliding the bar, the joint angle of the robot arm can be specified.
Move the mobile robot
urdf-viz ./openrr-planner/sample.urdf &
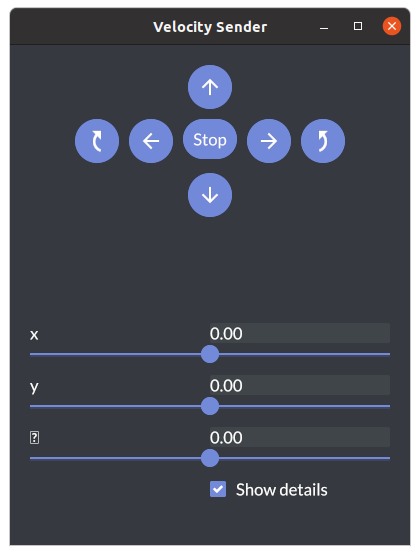
openrr_apps_velocity_sender
openrr_apps_velocity_sender \
--config-path ./openrr-apps/config/sample_robot_client_config_for_urdf_viz.toml
By sliding the bar, you can specify the robot's velocity and angular velocity.