openrr_apps_joint_position_sender
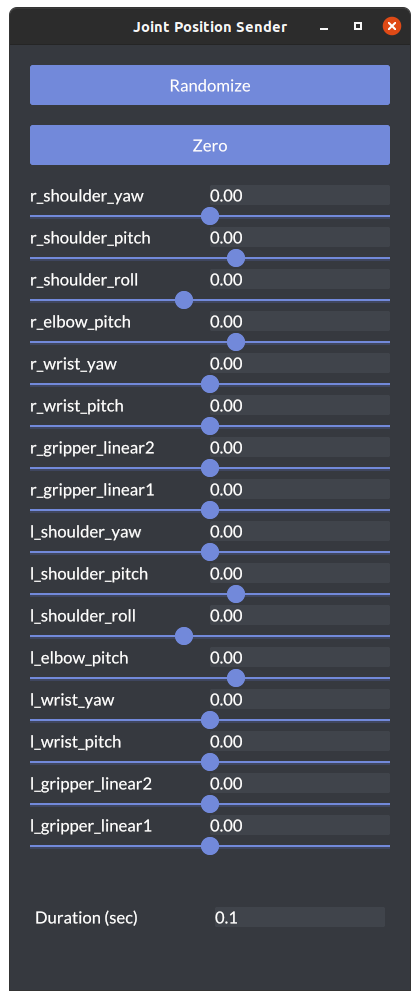
openrr_apps_joint_position_senderではマニピュレータなど関節ロボットについての各関節の値を指定することができます。
openrr_apps_joint_position_sender
使い方
openrr_apps_joint_position_sender [OPTIONS]
| Options | Description |
|---|---|
| -c, --config-path <CONFIG_PATH> | 設定ファイルへのパス |
| --config <CONFIG> | デフォルトまたは設定ファイルで指定した設定の上書き |
| -h, --help | ヘルプの出力 |