Operating robot from GUI
Move the robot arm
もしOpenRRをクローンしていなければ以下を実行してください。
git clone https://github.com:openrr/openrr
cd openrr
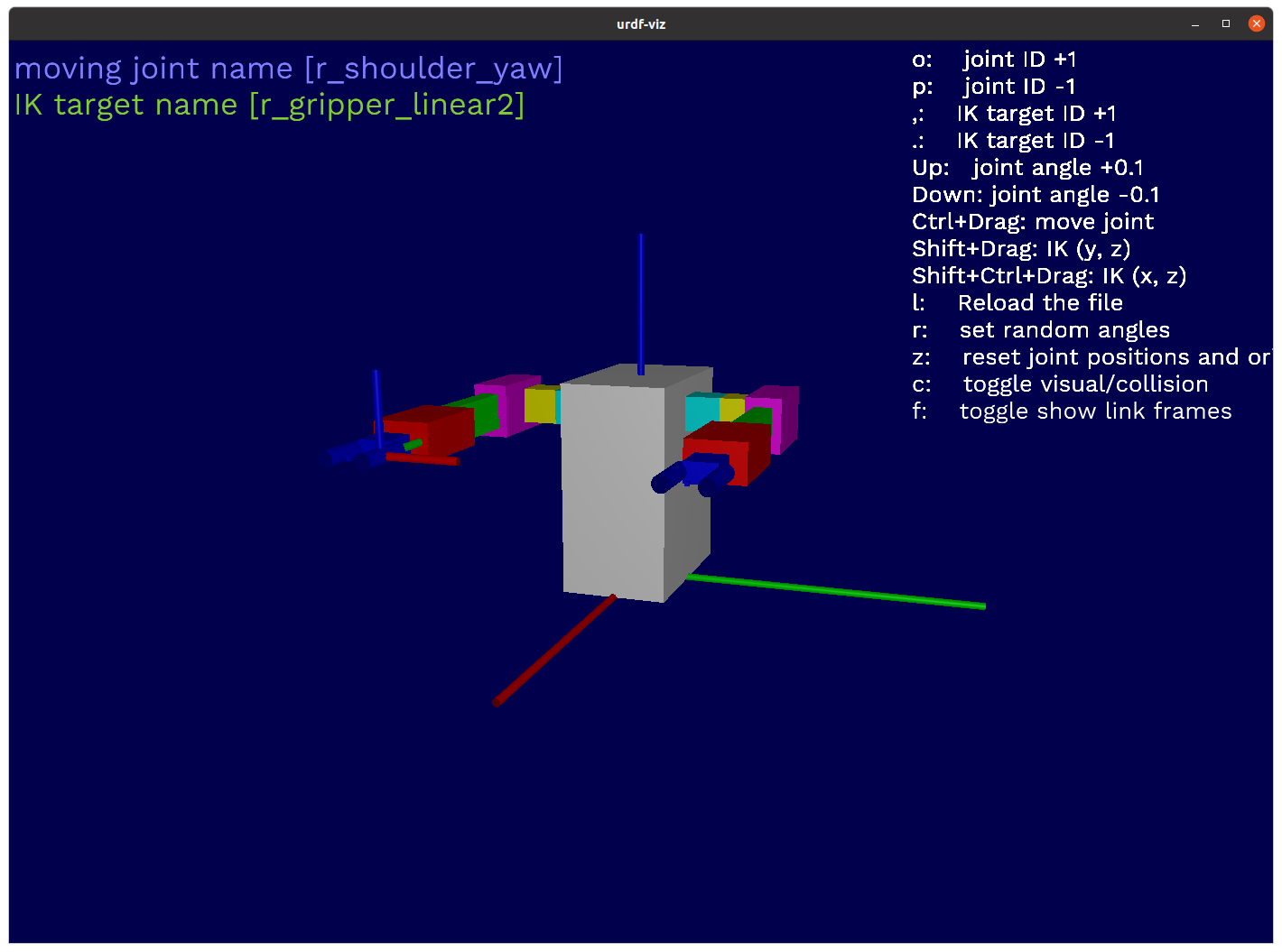
サンプルのロボットアームを表示させます。
urdf-viz ./openrr-planner/sample.urdf &
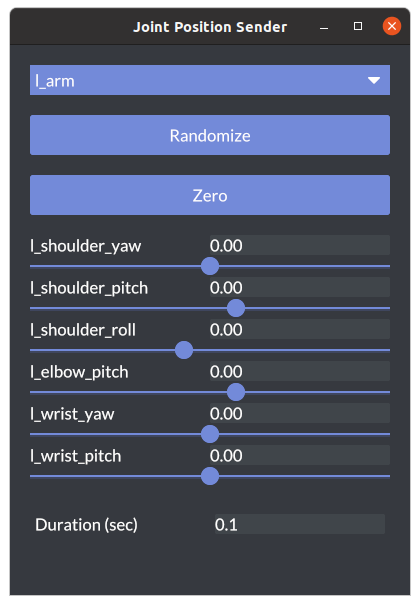
openrr_apps_joint_position_sender
openrr_apps_joint_position_sender \
--config-path ./openrr-apps/config/sample_robot_client_config_for_urdf_viz.toml
スライドバーを動かすことで、関節角を変更することができます。
Move the mobile robot
urdf-viz ./openrr-planner/sample.urdf &
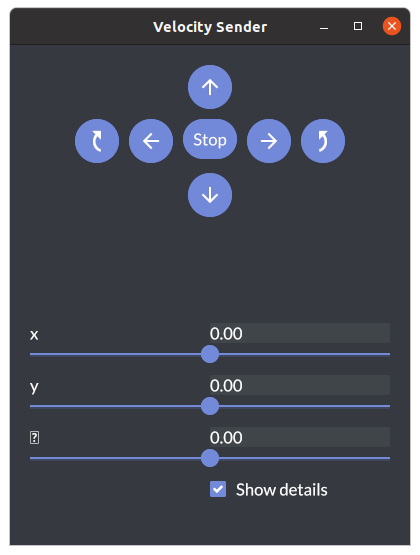
openrr_apps_velocity_sender
openrr_apps_velocity_sender \
--config-path ./openrr-apps/config/sample_robot_client_config_for_urdf_viz.toml
スライドバーを動かすことで、ロボットの速度と角速度を変更することができます。